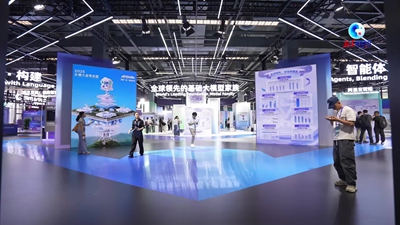

新华网沈阳9月6日电(记者丁峰)9月6日,2025全球工业互联网大会在沈阳开幕。在大会的展厅现场,依托中国科学院沈阳自动化研究所(以下简称沈自所)的辽宁辽河实验室科研团队研发的工业具身智能控制系统,正在赋能多台不同形态的机器人有条不紊地执行着不同任务。
这些机器人之所以能实现如此高效精准的作业,核心在于它们都搭载了沈自所自主研发的工业具身智能控制系统——这个被视作“工业大脑”的核心系统,正驱动着机器人在跨场景协同“智造”领域实现新突破。

机器人操作工程师正在操作轮式机器人完成工业物料抓取任务。
工业具身智能控制系统:赋予机器人“超级大脑”
观众的目光聚焦在一台机器人的夹爪动作上:它正以毫米级精度夹取物体,整个过程流畅稳定。“这依托于我们新一代工业具身智能控制核心系统,它就像赋予智能装备的‘超级大脑’。”沈自所副研究员兰大鹏博士向新华网记者介绍,该平台依托云端的软件定义能力,可实现毫秒级智能计算与自主决策,其意义在于能驱动生产效能跃升,助力达成工位全无人化与工厂全流程数字化目标。

沈自所副研究员兰大鹏博士向参会外国嘉宾讲解具身智能控制系统。
从技术架构看,具身智能控制平台构建了具备万级TFLOPS的FP16高性能计算能力与端到端具身智能模型开发能力的核心架构,实现了从工业多源数据采集、模型设计训练到复杂任务验证的全链路支撑。“平台在模型训练层面支持十亿级参数规模的大模型构建,输出频率可达50Hz,端到端推理延迟低于20ms。”兰大鹏介绍,这一性能足以满足高实时性、多任务并行和多机器人协同的复杂工业需求。
与传统语言模型仅具备“大脑”不同,这套具身智能控制系统真正实现了“大脑”与“躯体”的融合。“我们有完整的‘仿-训-集’工具链(ETC)、多模态模型库(EML)、行业数据集和协议体系(ECP),已经在多个工业场景实现锚点落地,具备可复制和扩展能力。”兰大鹏强调,这种模式使机器人具备自主思考与学习能力,而非仅执行单一固定任务。在半导体企业的落地实践中,该平台已展现出强大泛化性——不同形状的机器人本体均可在同一开发平台应用,打破了传统模型的局限性。
跨场景实践:从实验室到工业一线的“智造”突破
在半导体制造这一精密化生产领域,具身智能控制平台的优势尤为显著。兰大鹏对记者说,“我们已在一家头部半导体企业开展初步落地实践,实现了封装环节的夹取作业等应用。”
在现场演示中,机器人通过平台的多模态响应能力,能精准应对半导体制造中检测等危险作业场景,替代人工操作的同时,将误差控制在极低水平。

机器人操作工程师正在训练人形机器人完成工业物料抓取任务。
具身智能控制平台在汽车、家电等制造行业也具有应用潜力。平台在功能扩展层面,可面向不同本体构型和多类型机器人开展技能包的多工艺训练,支持任务迁移与快速迭代。该平台目前还服务于新能源汽车生产线,多台搭载该平台的机械臂可以协同完成车身焊接任务,通过模型泛化能力实现不同车型的快速切换生产,相比传统产线效率可以提升30%以上。
此外,科研团队还开发了适用于石油化工行业的防爆机器人工具包。“我们在国家项目的支持下,正在论证防爆机器人,有望实现防爆检测、巡查勘察等功能。”兰大鹏介绍,此类机器人在前期驯化阶段虽需人工遥操作辅助,但最终交付产品可完全自主作业,如同“机器人工人”般独立完成高危任务,从而降低人工操作风险。
技术底气:自主创新构筑产业护城河
展会现场的亮眼表现,源于沈自所科研团队在核心技术上的自主突破。“所有核心技术均为自主研发,这确保了技术的可控性。”兰大鹏强调,在具身智能领域,由于缺乏参考,需完全自主研发技术。
这些技术突破正加速转化为产业价值——除已落地企业外,另有10余家企业明确表达合作意向。“由于客户存在定制化需求,需根据不同生产线调整模型与平台,前期需要较长时间磨合。”兰大鹏介绍,这种磨合依托于平台的自身智能控制操作能力——通过数据采集输入、初步落地验证、模型调整优化的闭环流程,最终实现批量生产。目前团队已在半导体装备、轨道交通等领域验证多机器人协同作业及高精度柔性制造的可行性,形成可持续演进的技术体系。
在工业互联网与智能制造浪潮中,沈自所科研团队正加速推进工业具身智能控制系统建设,持续完善工业机器人从单一执行向智能协同的进化路径,为中国制造业数字化转型注入动能。